Press Thumbnail to Watch Video:
—————————————————————————————————————————————————————————————————————–
“Learning to Explore Indoor Environments using Autonomous Micro Aerial Vehicles”; Yuezhan Tao, Eran Iceland, Beiming Li, Elchanan Zwecher, Uri Heinemann, Avraham Cohen, Amir Avni, Oren Gal, Ariel Barel, Vijay Kumar; arXiv:2309.06986 [cs.RO] (ICRA-2024)


—————————————————————————————————————————————————————————————————————–
“Multi-Agent Distributed and Decentralized Geometric Task Allocation”; Michael Amir, Yigal Koifman, Yakov Bloch, Ariel Barel, Alfred M. Bruckstein, 2023 62nd IEEE Conference on Decision and Control (CDC), Singapore, Singapore, 2023, pp. 8355-8362; doi: 10.1109/CDC49753.2023.10383740
—————————————————————————————————————————————————————————————————————–
“Reinforcement Learning Based Decentralized Weapon-Target Assignment and Guidance”; Gleb Merkulov, Eran Iceland, Shay Michaeli, Yosef Riechkind, Oren Gal, Ariel Barel, and Tal Shima. In AIAA SCITECH 2024 Forum, p. 0125. 2024; https://arc.aiaa.org/doi/abs/10.2514/6.2024-0125

—————————————————————————————————————————————————————————————————————–
“Integrating Deep Reinforcement and Supervised Learning to Expedite Indoor Mapping”; Elchanan Zwecher, Eran Iceland, Sean R. Levy, Shmuel Y. Hayoun, Oren Gal, Ariel Barel. In 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, 2022 (pp. 10542-10548). IEEE; https://ieeexplore.ieee.org/abstract/document/9811861
—————————————————————————————————————————————————————————————————————–
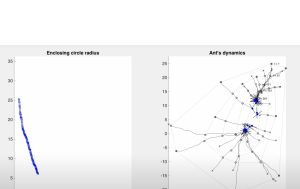
“Local Interactions for Cohesive Flexible Swarms”; Rotem Manor, Ariel Barel, Alfred M. Bruckstein (IRC 2020 XIV. Conference, Tokyo 2019); arXiv:1903.09259 [cs.MA]
—————————————————————————————————————————————————————————————————————–
“Probabilistic Gathering of Agents with Simple Sensors”; Ariel Barel, Rotem Manor, Alfred M. Bruckstein (Poster, Conference on Collective Behavior, SMR 3201, Trieste 2018); arXiv:1902.00294 [cs.MA]